Importando datos a PostGIS¶
Qué es Imposm¶
Se trata de una serie de scripts Python que permiten importar datos de OpenStreetMap a una base de datos Postgres. Los archivos a importar deben estar en el formato XML o PBF de OSM y la base de datos debe tener activada la extensión espacial PostGIS.
Su espiritu es optimizar la creación de bases de datos geográficas enfocadas a renderizar o a montar servicios WMS.
Los desarrolladores principales son Omniscale, que es la empresa de Dominik Helle y Oliver Tonnhofer, que también están detrás del proyecto MapProxy.
Funciona en Linux y Mac OS X y es código libre bajo licencia Apache Software License 2.0.
Características¶
- Esquemas de base de datos personalizados
- Crea tablas separadas para cada tipo de dato. Permite crear estilos ndependientes de manera sencilla y mejora el rendimiento de renderización.
- Soporte para Multiples CPUs
- Está pensado para usar procesos paralelos de manera que distribuye la carga de trabajo entre los CPUs y núcleos del equipo.
- Normaliza valores
- Por ejemplo, todos los posibles valores boleanos 1, on, true y yes se convierten en TRUE.
- Soporte para localización de cadenas de texto
- Busqueda personalizable de valores localizados
- Filtro por etiqueta o por valor
- La importación es selectiva y configurable
- Cache eficiente de nodos
- Para almacenar las calles y las relaciones es necesario almacenar todos los nodos. Imposm usa la base de datos basada en archivo Tokyo Cabinet que almacena pares clave valor para hacer una cache de estos datos. Así se reduce de manera significativa el uso de la memoria.
- Tablas generalizadas
- Se pueden crear automáticamente tablas con menor resolución espacial, lo que permite por ejemplo preparar rápidamente renders de grandes redes a bajas resoluciones
- Vistas de uniones
- Permite crear vistas que combinen distintas tablas. Por ejemplo podemos disponer de la cartografía de carreteras separada en tablas para autopistas, carreteras principales y calles, pero también una vista que integre todas estas tablas.
Limitaciones¶
No permite el uso de actualizaciones diferenciales
Solo permite el uso de bases de datos PostGIS, aunque podría implementarse con facilidad su uso con otras como SpatialLite, Oracle, etc.
Aunque es bastante eficiente con el uso de la memoria, las importaciones de datos masivas pueden llevar bastante tiempo: un archivo de 1 GB (comprimido, equivalente a Alemania) en un sistema con 2 GB RAM o Europa entera (~5 GB) en un sistema de 8 GB no darían problemas, pero un planet requerirá de unos 16 GB de RAM o más (tarda unas 20h con 8GB).
Ejercicio¶
A continuación se detalla una práctica guiada en la que se verán los detalles básicos del manejo de la aplicación Imposm.
Se espera del lector que vaya ejecutando las instrucciones que se detallan a continuación y en caso de duda pregunte al facilitador.
Importante
El entorno de trabajo que se supone para esta práctica es OSGeo Live 7.0.
Para trabajar lo primero que vamos a hacer es crear la carpeta en la que trabajaremos. Abrimos una terminal y cambiamos al directorio tecleando
$ cd ~
Creamos un nuevo directorio y accedemos al mismo
$ mkdir tallerimposm
$ cd tallerimposm
Instalación¶
Lo primero es instalar algunas dependencias del sistema (es probable que ya tengamos instaladas algunas de ellas):
$ sudo apt-get install build-essential python-dev protobuf-compiler \
libprotobuf-dev libtokyocabinet-dev python-psycopg2 \
libgeos-c1 libgdal1-dev libspatialindex-dev \
python-virtualenv tree
El siguiente paso depende de si nuestra máquina tiene acceso a Internet por el puerto 443 y por tanto podemos instalar paquetes con pip o no. En el segundo caso se ofrece un entorno virtual ya funcional para descarga.
Si podemos instalar paquetes en el entorno virtual¶
Crear el entorno virtual e instalar los paquetes necesarios ejecutando:
$ virtualenv venv
$ source venv/bin/activate
(venv)$ pip install imposm rtree
Si no podemos instalar paquetes en el entorno virtual¶
Descargamos un entorno virtual ya preparado y nos aseguramos de descomprimirlo en la carpeta /home/user/tallerimposm. Una vez descargado lo activamos con:
$ cd /home/user/tallerimposm
$ source venv/bin/activate
Importante
Para que el taller funcione debe descomprimirse en la carpeta que se ha indicado, no funciona en ninguna otra ubicación sin hacer bastantes cambios en su configuración interna (y esto tampoco es aconsejable en cualquier caso).
Comprobar la versión de imposm¶
Para comprobar la versión de imposm ejecutamos:
(venv)$ imposm --version
Y deberíamos obtener:
Enabling Shapely speedups.
imposm 2.5.0
Obtener el juego de datos¶
Para este ejercicio vamos a usar una exportación de OpenStreetMap de la ciudad de Nottingham. Este juego de datos está ya en OSGeo Live 7 por lo que no tenemos que descargarlo.
El fichero que usaremos está es /usr/local/share/data/osm/Nottingham.osm.bz2 y dispone de unos 4000 puntos de interés y unas 84000 vías.
Preparando la base de datos¶
El primer paso para la carga de datos es la creación de la base de datos. OSGeo Live 7.0 dispone de Posgres 9.1 con PostGIS 2.0. En esta combinación y con la configuración de OSGeo Live es muy sencillo crear una base de datos geográfica a la que nuestro usuario del sistema tendrá acceso. Para crear la base de datos nott-osm basta con ejecutar los siguientes comandos:
(venv)$ createdb -E UTF8 nott-osm
(venv)$ psql -d nott-osm -c "create extension postgis;"
Si por alguna razón queremos borrar la base de datos basta con ejecutar:
(venv)$ dropdb nott-osm
Primera importación¶
Podemos proceder a la primera importación de datos que realizaremos haciendo los tres pasos por separado:
- Lectura
- Escritura
- Optimización
Lectura¶
Se realiza empleando el comando:
$ imposm --read /usr/local/share/data/osm/Nottingham.osm.bz2
Como la cantidad de datos no es muy grande, solo tardará unos segundos. Una vez acaba podemos comprobar que ha creado los archivos de cache listando los archivos del directorio:
$ ls
imposm_coords.cache imposm_nodes.cache imposm_relations.cache imposm_ways.cache venv
Imposm ha generado los archivos .cache que son archivos binarios con los datos preparados para ser incluidos en la base de datos.
Escritura¶
Se realiza empleando el comando:
(venv)$ imposm --database nott-osm --host localhost --user user --write
Solicitará la constraseña del usuario user y cargará los datos que hay en los archivos .cache.
Podemos investigar qué ha hecho Imposm lanzando la aplicación pgAdmin III que está instalada en la máquina virtual en el menú Development. Podemos comprobar que ha creado 24 tablas nuevas, todas con el sufijo new_
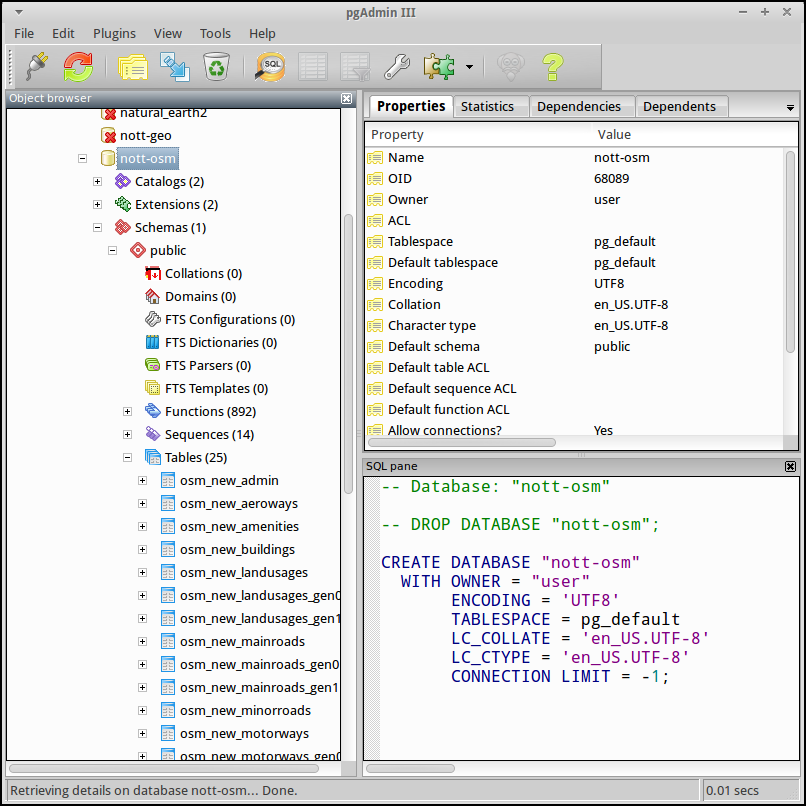
El esquema de tablas y qué etiquetas ha importado son los estándar ya que aún no hemos cambiado los mappings. En concreto podremos encontrar:
- Amenities
- Places
- Transport_points
- Administrative polygons
- Buildings
- Landusages
- Aeroways
- Waterareas
- Roads (en realidad repartidas en varias tablas en función de la categoría)
- Railways
- Waterways
También vienen unas tablas con geometrías de las vías de transporte generalizadas en función de dos tolerancias y unas vistas que agrupan todas las carreteras.
Optimización¶
El último paso de la carga de datos sería la optimización de los datos que se realiza empleando el comando:
(venv)$ imposm --database nott-osm --host localhost --user user --optimize
Todo en un paso¶
En realidad los tres pasos anteriores se podrían ejecutar en un solo comando:
$ imposm --database nott-osm --host localhost --user user \
--read --write --optimize /usr/local/share/data/osm/Nottingham.osm.bz2
Flujo de trabajo¶
Nota
Manten pgAdmin abierto y refresca con F5 para ver cómo van actualizándose las tablas.
Pasar a producción¶
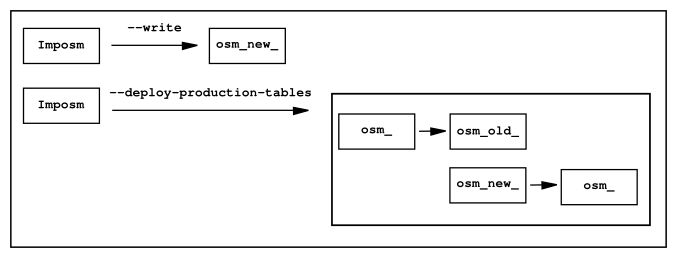
El flujo de trabajo recomendado permite el despliegue de las tablas conservando hasta 3 versiones a la vez del mismo juego de datos. El despliegue se inicia al ejecutar el comando:
$ imposm --database nott-osm --host localhost --user user --deploy-production-tables
La importación de datos se hace sobre tablas a las que se le añade el prefijo osm_new_ en el nombre. Podremos comprobar con pgAdmin III como se ha cambiado el nombre de todas las tablas perdiendo el prefijo new_. Si ya hubiéramos hecho otro despliegue las actuales tablas osm_ se renombrarán automáticamente a osm_old_. Cada vez que se hace un despliegue se borrarán primero las osm_old_.
Si volvemos a cargar la cache y a pasar a producción las tablas con:
$ imposm --database nott-osm --host localhost --user user \
--write --optimize --deploy-production-tables
veremos como las tablas que no tengan prefijo pasarán a tener el prefijo old_.
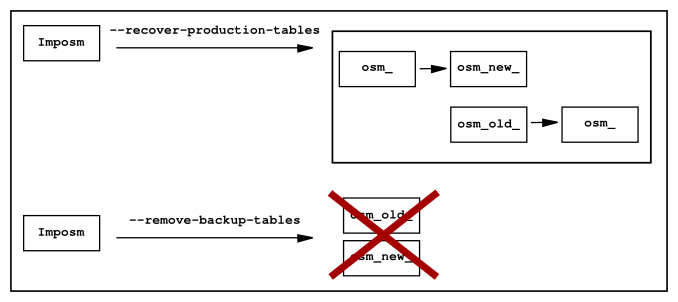
Revertir el despliegue y borrar tablas temporales¶
Para revertir el despliegue se puede ejecutar el comando:
$ imposm -d osm --recover-production-tables
Finalmente para borrar definitivamente las tablas marcadas con old_ y las marcadas con new_ se emplea el comando:
$ imposm --database nott-osm --host localhost --user user --remove-backup-tables
Modificando el mapping¶
El esquema de base de datos por defecto que utiliza Imposm viene de los elementos y etiquetas más comunes de OSM. Este esquema permite trasladar los datos empleando el paquete imposm.mapping y las estructuras definidas en el archivo:
/usr/local/lib/python2.7/dist-packages/imposm/defaultmapping.py
Tablas¶
Hay definidas tres clases de Python para las geometrías base: Points, LineStrings y Polygons y todas las tablas tienen que ser instancias de una de ellas. Las tres clases usan los mismos argumentos:
- name
- Nombre de la tabla (sin prefijos).
- mapping
- El mapping de los pares clave/valor básicos que se meterán en la tabla.
- fields
- El mapping de campos adicionales que también son pares clave/valor de OSM y que se convertirán en columnas de la tabla.
- field_filter
- Filtros que permitan discriminar los datos que se introducen.
mapping¶
El argumento Mapping debe ser un diccionario (un diccionario de Python) en la que las claves de OSM (p.e. highway, leisure, amenity, etc.) son las claves del diccionario y los valores de OSM (p.e. motorway, trunk, primary, etc.) los valores de las claves del diccionario.
Para una tabla de paradas de autobús, de tranvía y de ferrocarril el mapping debería ser parecido a este:
mapping = {
'highway': (
'bus_stop',
),
'railway': (
'station',
'halt',
'tram_stop',
)
}
fields¶
El argumento fields debe ser una lista (o una tupla) con el nombre de la columna y su tipo de dato. Se emplea para añadir información adicional a la tabla. Imposm tiene clases para los tipos de datos más comunes que son las responsables de hacer sustituciones como 1, yes y true a TRUE en caso de datos booleanos por lo que se recomienda su uso:
fields = (
('tunnel', Bool()),
('bridge', Bool()),
('oneway', Direction()),
('ref', String()),
('z_order', WayZOrder()),
)
En el ejemplo la línea ('tunnel', Bool()) convertirá los valores de la clave tunnel a valores booleanos.
Ejemplo¶
towers = Points(
name = 'towers',
mapping = {
'man_made': (
'tower',
'water_tower',
)
}
fields = (
('height', Integer()),
)
)
Ampliando el esquema por defecto¶
El esquema que carga Imposm por defecto es generalmente insuficiente ya que se suele emplear un abanico de datos mucho más amplio.
Por ejemplo, en nuestro caso no se está incluyendo en la base de datos ningún registro de los siguientes tipos y subtipos:
- Amenity
- restaurant
- pub
- cafe
- place of worship
- parking
- Natural
- Tourism
- Barrier
Por lo que debemos modificar el archivo de mapping para que los incluya. El archivo mapping se encuentra en la siguiente localización:
/usr/local/lib/python2.7/dist-packages/imposm/defaultmapping.py
lo copiamos y editamos empleando los siguientes comandos:
(venv)$ cd ~/tallerimposm
(venv)$ cp venv/lib/python2.7/site-packages/imposm/defaultmapping.py mappingtaller.py
(venv)$ medit mappingtaller.py
Buscamos la cadena amenities = Points usando el comando buscar de medit pulsando en la lupa de la barra de herramientas.
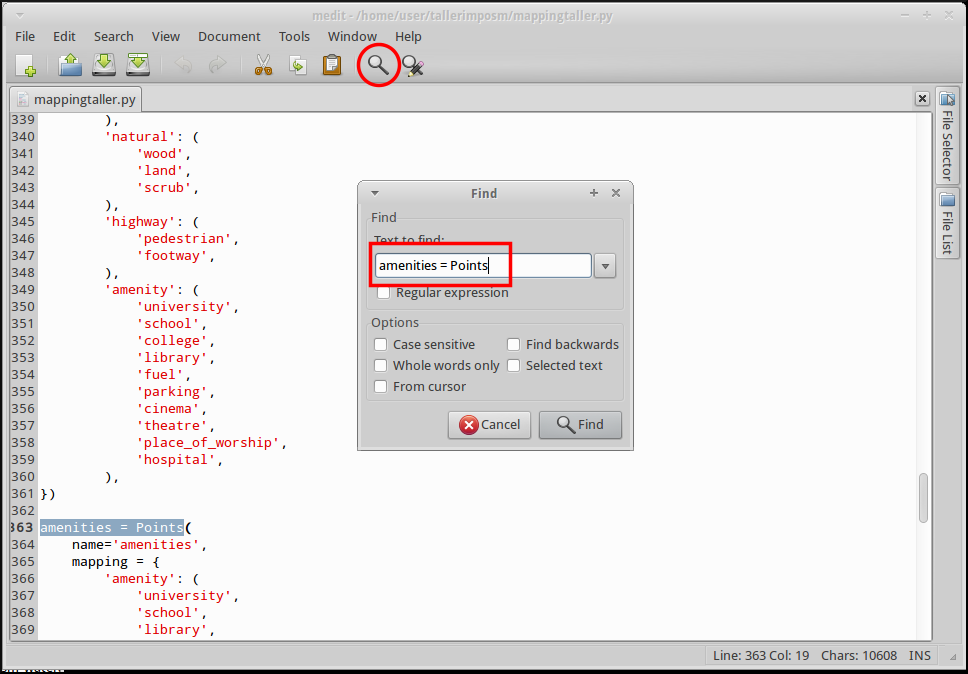
Como podemos ver, Imposm por defecto tiene determinados tipos de Amenity cuando son puntos pero no tiene ninguno de los indicados en la lista referida un par de párrafos más arriba.
Vamos a añadir al argumento mapping los elementos que le faltan (no importa el orden) respetando la sintaxis de tuplas de Python de forma que quede de la siguiente manera:
amenities = Points(
name='amenities',
mapping = {
'amenity': (
'university',
'school',
'library',
'fuel',
'hospital',
'fire_station',
'police',
'townhall',
'restaurant',
'pub',
'cafe',
'place_of_worship',
'parking',
),
})
El caso de los árboles (natural/tree) es distinto ya que por defecto Imposm no incluye un mapping para la clave Natural, por lo que la crearemos desde cero, justo debajo del objeto amenities vamos a crear un nuevo objeto para poder importarlos.
arboles = Points(
name = 'arboles',
mapping = {
'natural': (
'tree',
),
},
)
Guardamos el archivo con y salimos de medit.
Ejecutamos el comando para escribir y optimizar los datos en la base de datos:
(venv)$ imposm --database nott-osm --host localhost --user user \
--read /usr/local/share/data/osm/Nottingham.osm.bz2 \
--write --optimize --deploy-production-tables \
--overwrite-cache --remove-backup-tables -m mappingtaller.py
En este caso es necesario volver a leer los datos y generar los archivos de cache, ya que hemos modificado la estructura de los datos. Con la opción --overwrite-cache se sobrescribirán directamente los archivos necesarios.
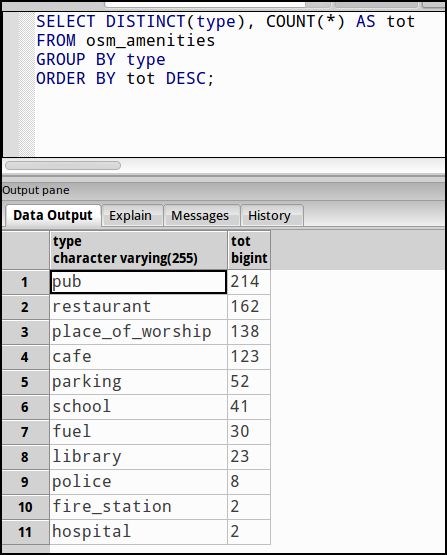
Con pgAdmin podemos comprobar como se han importado 1059 árboles y si echamos un vistazo a la tabla osm_amenities veremos que se han importado puntos con las etiquetas que hemos elegido.
Ejercicio¶
Como ejercicio del taller se propone crear el mapping, escribir los datos en la base de datos y desplegar las tablas para las claves de OSM siguientes:
- tourism (71 puntos nuevos):
- information, hotel, artwork y attraction
- barrier (1688 puntos nuevos):
- gate, bollard, entrance, cycle_barrier, lift_gate, stile y fence